The Basics of Drive Technology: The Key to Modern Control Systems
Drive technology forms the backbone of contemporary automation and control systems. Key aspects such as the operation of motors and inverters, Y/Δ switching, operation at 87 Hz, and the application of encoder systems are not only critical for engineers but also play a vital role in optimizing industrial processes. In this article, we will delve into the fundamental concepts of drive technology, exploring their applications and significance in modern engineering.
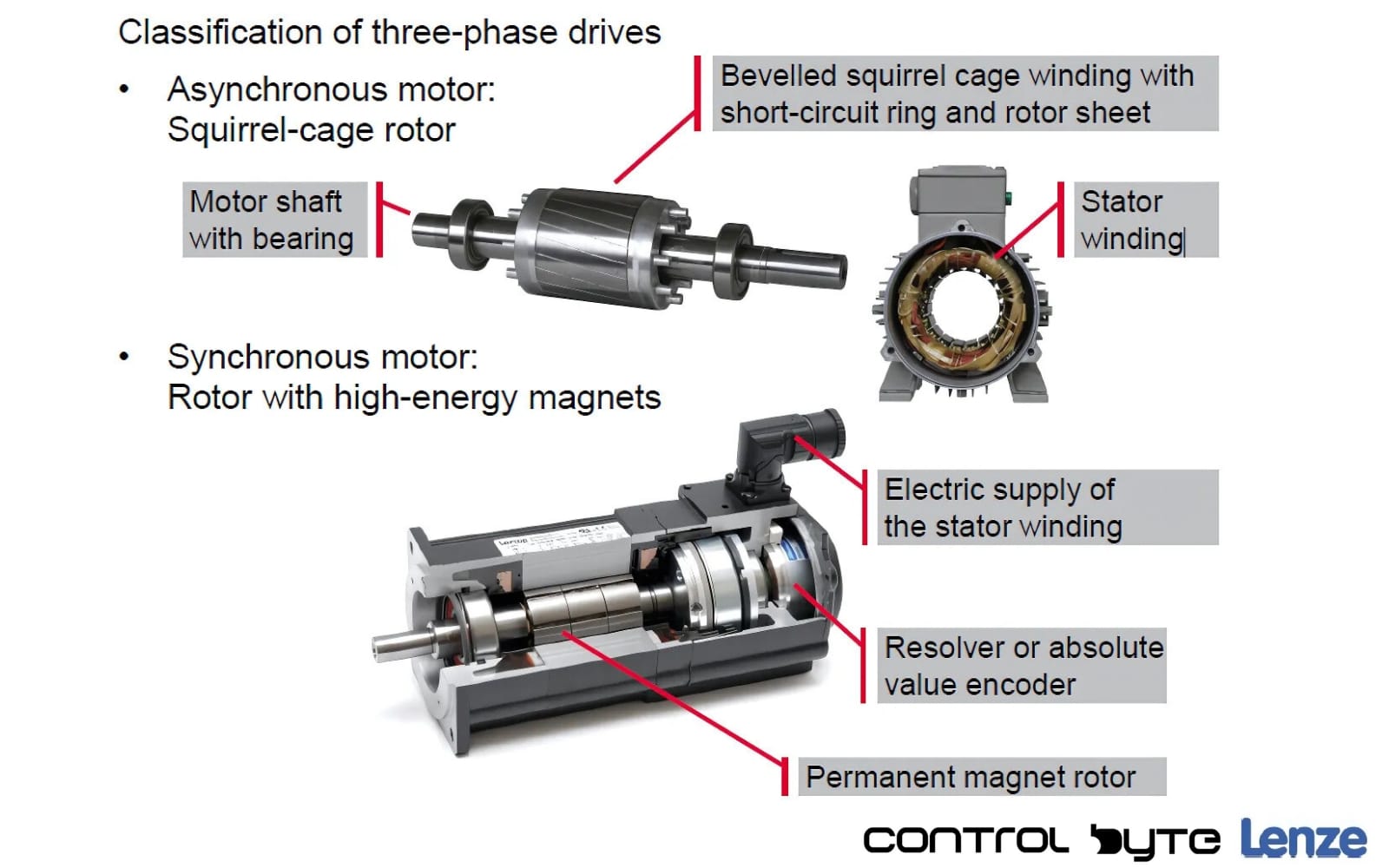
Motor Structure: Asynchronous and Synchronous Motors
Three-phase electric drives are divided into two main categories: asynchronous motors and synchronous motors. Each of these types features distinct construction and applications.
Asynchronous Motors
Asynchronous motors, also known as squirrel-cage motors, have a rotor in the form of a squirrel cage. The key components of their construction are:
- Squirrel cage with a short-circuit ring and rotor laminations, enabling the generation of an electromagnetic field.
- Shaft with a bearing, ensuring stability and smooth motion.
- Stator winding, where electrical power is supplied.
This type of motor is widely used due to its simple design and low production costs.
Synchronous Motors
Synchronous motors feature a rotor with permanent magnets that generate a constant magnetic field. They are distinguished by their precision, particularly in applications requiring constant rotational speed. Their key components include:
- Rotor with permanent magnets, ensuring a stable magnetic field.
- Power supply system for the stator winding, providing electrical energy.
- Absolute encoder or resolver, enabling precise control of position and speed.
Synchronous motors are popular in advanced industrial applications where high efficiency and precision are required.

Nameplate of a Three-Phase Motor: Key Parameters
The nameplate is an integral part of every electric motor, containing all essential technical information. Using a standard three-phase motor as an example, the following parameters can be identified:
- Type of Connection (Y/Δ)
Indicates the method of connecting the motor windings in a star (Y) or delta (Δ) configuration, affecting its rated voltage and performance. - Rated Voltage (V_N)
The maximum supply voltage that can be delivered to the motor without risk of damage. - Base Frequency (f_N)
The standard operating frequency of the motor, typically 50 Hz or 60 Hz, depending on the region. - Rotational Speed (n_N)
Specifies the number of revolutions per minute (rpm) under nominal operating conditions. - Rated Power (P_N)
The maximum power the motor can deliver, expressed in kilowatts (kW). - Rated Current (I_N)
The amount of electric current the motor draws when operating under full load. - Power Factor (cos φ)
A parameter indicating the efficiency of the motor’s electrical energy usage. - Motor Catalog Number
A unique identification number provided by the manufacturer to facilitate specification tracking and servicing.
Understanding these parameters is essential during the installation, configuration, and operation of the motor. They also aid in selecting the appropriate VFD frequency inverter for a specific device, enabling precise control of speed and torque.

Star (Y) and Delta (Δ) Connections: Key Differences and Applications
Three-phase motors can be connected in two basic configurations: star (Y) or delta (Δ). The choice of configuration affects the supply voltage and the motor’s operating parameters.
Star (Y) Connection
In the star (Y) connection, each motor winding is connected at one end to a neutral point (the center of the system), while the other end of the winding is connected to the corresponding supply phase. Characteristics of this configuration:
- Phase voltage supply (e.g., 230 V), which reduces the load on the windings.
- Lower current in the windings, minimizing heat losses.
- Mainly used during motor startup to limit inrush current.
Delta (Δ) Connection
In the delta (Δ) connection, the motor windings form a closed loop, with each winding connected between two supply phases. Characteristics of this configuration:
- Line voltage supply (e.g., 400 V), enabling the motor to achieve its full power.
- Higher current in the windings compared to the star configuration.
- Used during normal motor operation when full load is required.
Applications and Importance of Y/Δ Switching
Switching between star and delta connections (the Y/Δ configuration) is commonly used to reduce the inrush current of a motor. This makes it possible to start high-power motors without overloading the electrical network.
The connection configuration is also important when using a VFD frequency inverter. Frequency inverters allow for the adjustment of supply voltage and frequency, enabling precise control of motors connected in both Y and Δ configurations.

Motor Current: Components and Dependencies
The electric current flowing through a motor is one of the key parameters that define its operation. Understanding the components of the current and the relationships between them is crucial for the proper design and operation of drive systems.
Components of Motor Current
The motor current can be divided into two main components:
- Magnetizing current (I_d): Responsible for generating the magnetic field in the motor. The value of this current depends on the motor’s voltage and the phase angle (φ).
- Active current (I_q): Responsible for generating the motor’s torque. In drive control systems, the value of this current is often regulated to adapt the motor’s operation to the application’s requirements.
Dependencies in Motor Operation
During normal motor operation, the total current (I_total) is the vector sum of the magnetizing current and the active current. Under full motor load:
- The rated current (I_N) determines the maximum value the motor can safely draw.
- The phase angle (φ) defines the relationship between voltage and current, affecting the power factor (cos φ).
In the case of partial load operation, the magnetizing current (I_d) remains constant, while the active current (I_q) decreases, affecting the phase angle and efficiency.
Current-related calculations
Important equations related to motor current analysis are:
Magnetizing current:
Id = IN · sin φ
Electrical power consumed by the motor:
PEL = √3 · VN · IN · cos φ

Motor Speed: Synchronous, Asynchronous, and Slip
The rotational speed of the motor is a key parameter that determines its performance and suitability for various drive systems. In three-phase motors, two main types of speed are distinguished: synchronous and asynchronous.
Synchronous Speed
Synchronous speed (n_sync) is the theoretical rotational speed of the magnetic field generated by the stator windings. It can be calculated using the formula:
nsync = 60 · f⁄p
Where:
- f is the supply frequency (e.g., 50 Hz or 60 Hz),
- p is the number of pole pairs in the motor.
Synchronous speed is constant for a given supply frequency and number of pole pairs, regardless of the motor’s load.
Asynchronous Speed and Slip
Asynchronous motors operate at a speed slightly lower than synchronous speed. This difference is due to slip (s), which is necessary for generating torque. Slip can be calculated using the formula:
sN = 1 – nN⁄nsync
Where:
- sN is the rated slip.
- nN is the rated rotational speed of the motor.
Slip is expressed as a percentage, and in practice, for industrial motors, it typically ranges from 1% to 6%. The higher the load, the greater the slip.
Application of Speed in Practice
Understanding synchronous speed, asynchronous speed, and slip is crucial when designing drive control systems. Modern solutions, such as Servo Drives and VFD frequency inverters, allow for precise motor speed control, enabling the adaptation of motor performance to application requirements. This results in better energy efficiency and operational precision.

Rotating Magnetic Field in the Motor: Interaction Between the Stator and Rotor
The operation of electric motors is based on the phenomenon of the rotating magnetic field, which allows for the transfer of energy from the electrical system to the mechanical system. This field is generated in the stator and interacts with the rotor, causing it to rotate.
Generation of the Rotating Magnetic Field
The rotating magnetic field is generated by the three-phase supply to the stator windings. The individual phases (L1, L2, L3) are shifted by 120° relative to each other, which results in a continuous change in the direction and intensity of the magnetic field in the stator. The result:
- The stator generates a dynamic magnetic field that rotates at synchronous speed (n_sync).
- This field interacts with the windings or permanent magnets of the rotor, resulting in the generation of torque.
Interaction Between the Stator and Rotor
The rotating magnetic field induces current in the rotor windings (in the case of an asynchronous motor) or attracts permanent magnets (in the case of a synchronous motor). This interaction causes the rotor to move in the direction of the magnetic field.
- In asynchronous motors, the rotor always rotates at a speed slightly lower than synchronous speed due to the need for slip.
- In synchronous motors, the rotor rotates at the same speed as the magnetic field, ensuring high operational precision..
Current and Magnetic Field Graphs
The diagrams show the changes in the currents in the stator windings and the corresponding magnetic field vectors. Due to the phase shift, the three currents create a constant rotating magnetic field, which ensures even loading of the stator windings and stable motor operation.
The Importance of the Rotating Magnetic Field
The rotating magnetic field is the foundation of modern electric drive systems. With technologies such as Servo Drive and VFD frequency inverters, precise control of the magnetic field parameters is possible, allowing for the optimization of motor performance in various industrial applications.

Torque Characteristics: Asynchronous Motor without Control
The torque characteristics in asynchronous motors play a key role in understanding their operation and performance under various working conditions. In the case of motors without control, several important points and dependencies can be distinguished.
Key Points of the Torque Characteristics
- Starting Torque (MStar)
This is the torque generated by the motor during startup. It should be large enough to overcome mechanical resistance and start the device. - Moment podnoszenia (MP)
Minimalny moment, jaki silnik generuje podczas przyspieszania do prędkości pracy. Zbyt mały moment podnoszenia może powodować trudności w osiągnięciu stabilnej pracy. - Pull-up Torque (MP)
The minimum torque that the motor generates during acceleration to operating speed. A too-low pull-up torque can cause difficulties in achieving stable operation. - Load Torque (ML)
This is the torque that the motor must overcome to maintain operation at a given load. The operating point (OPOPOP) is where the motor’s torque balances the load torque.
Slip and Torque
Slip (s) plays a key role in generating torque. As the load increases, the rotor speed decreases, which increases slip and torque. However, if slip becomes too large, the torque begins to decrease, leading to motor overload or stalling.
Operating Mode and Generator Mode
On the torque curve, two operating modes can be observed:
- Motor Mode: The motor operates as a drive, converting electrical energy into mechanical energy.
- Generator Mode: In this region (at speeds greater than nsync), the motor converts mechanical energy into electrical energy, such as during braking.
The Importance of Torque Characteristics
The analysis of torque characteristics helps engineers select the appropriate motors for applications. Modern technologies, such as Servo Drive and VFD frequency inverters, enable precise torque control, which enhances the efficiency and reliability of the drive system.

Power Supply from the Grid vs. Power Supply from the Inverter: Key Differences
Electric motors can be powered either directly from the electrical grid or through an inverter (VFD frequency inverter). Each of these solutions has its own distinct features and applications.
Direct Power Supply from the Grid
In the case of direct connection of the motor to the electrical grid, the power supply parameters are constant and comply with UCTE standards (for Central Europe):
- Supply Voltage: Typical values are 230 V (single-phase) or 400 V (three-phase), with a tolerance of ±10%. The allowable voltage range is 207–256 V for single-phase and 360–440 V for three-phase.
- Frequency: The standard value is 50 Hz, with a tolerance of ±0.3% (range 49.85–50.15 Hz).
Advantages:
- Simple installation and operation.
- Constant rotational speed resulting from synchronous speed.
Disadvantages:
- Lack of speed and torque regulation.
- Higher energy losses in some applications.
Power Supply via Inverter:
Inverters (VFD frequency inverters) allow precise adjustment of power supply parameters to meet the needs of the application. Key features:
Inverter Input:
- Single-phase voltage: 180–264 V
- Three-phase voltage: 320–550 V
- Frequency: 45–65 Hz (no tolerance)
Inverter Output:
- Variable voltage: 0–230/400/500 V
- Variable frequency: 0–1000 Hz
Advantages:
- Ability to adjust rotational speed across a wide range, regardless of synchronous speed.
- Precise torque control, enhancing energy efficiency.
- Ability to operate in different modes (e.g., generator mode).
Disadvantages:
- Higher initial costs compared to direct supply.
- Requires more advanced configuration and control.
When to Choose an Inverter?
The use of an inverter is particularly beneficial in applications requiring variable speed, such as conveyor belts, pumps, or fans. It allows for the optimization of motor operation and adjustment of its parameters to meet actual requirements, resulting in energy savings and extended equipment lifespan.

Inverter Power Modules: Key Components and Their Functions
Inverters (VFD frequency inverters) are advanced devices that allow precise control of motor operating parameters. A key part of their design is the power modules, which enable the conversion of electrical energy from the grid into power tailored to the motor’s requirements.
Main Power Modules of an Inverter
- Rectifier:
The first stage of the inverter’s operation is the rectification of the alternating current (AC) voltage supplied from the electrical grid. The rectifier converts this voltage into direct current (DC) voltage.- Function: Provides a stable DC voltage supply for the subsequent stages of the inverter.
- Application: Voltage stabilization under varying grid load conditions.
- DC bus:
The DC bus acts as an intermediate energy storage between the rectifier and the inverter.- Function
- Energy buffering.
- Filtering and smoothing of DC voltage.
- Protection against voltage fluctuations.
- Application: Reducing disturbances and ensuring the continuity of system operation.
- Function
- Inverter:
The final stage of the inverter’s operation is the conversion of the DC voltage from the DC bus into an AC voltage with adjustable frequency and amplitude.- Function: Generating an output AC signal that can be adjusted to the motor’s speed and torque.
- Application: Precise control of motor operating parameters, such as speed and torque.
Advantages of Power Modules in Inverters:
Dzięki zastosowaniu modułów mocy inwertery oferują:
- The ability to control motor speed over a wide range.
- Optimization of energy consumption in industrial applications.
- Increased durability and reliability of the motor by eliminating sudden voltage spikes.
Practical Applications
Inverter power modules are used in various fields, from heavy industry to HVAC, where precise control of speed and torque is crucial for energy efficiency and system performance.

Inverter Power Modules: Technical Details
The construction of power modules in an inverter (VFD frequency inverter) consists of several key components that work together to convert and control electrical energy. This section provides a detailed look at the individual modules and their functions.
1. Rectifier and Overvoltage Protection
The first module in the inverter is responsible for converting alternating current (AC) voltage into direct current (DC).
- Functions of the Rectifier:
- Conversion of mains voltage into DC voltage.
- Limitation of overvoltage using a protection circuit.
- Key Components:
- Rectifier diodes.
- Overload protection systems.
2. DC Bus and Inrush Current Limiting Circuit
The DC bus is a critical component that connects the rectifier to the inverter.
- Functions of the DC Bus:
- Buffering and storing energy in capacitors.
- Stabilizing DC voltage.
- Reducing interference.
- Inrush Current Limiting Circuit:
- Protects inverter components from damage during sudden current surges.
3. Braking Circuit
The braking circuit enables the safe dissipation of excess energy during motor braking.
- Functions:
- Redirecting energy to a braking resistor.
- Preventing overheating.
- Key Components:
- Braking resistor (R_Brake).
- Brake chopper module.
4. Inverter
The final module converts DC voltage from the DC bus into AC voltage with adjustable frequency and amplitude.
- Functions:
- Generating output voltage tailored to motor requirements.
- Precise control of parameters such as speed and torque.
- Key Components:
- Power transistors (e.g., IGBT).
- Freewheeling diodes.
- Output current detection systems.
Importance of Power Modules
The detailed design of inverter power modules enables precise motor control in various industrial applications. With advanced features such as the braking circuit and dynamic energy management, inverters significantly enhance energy efficiency and the reliability of the entire system.

How an Inverter Works: What You Need to Know
Inverters (VFD frequency inverters) are advanced devices that offer numerous benefits in controlling electric drives. Their operation highlights several key advantages and functions.
Benefits of Using an Inverter
- Reduced Network Load:
- Reduced Starting Currents: Inverters minimize sudden current surges through soft-start functionality, protecting both the motor and the electrical network.
- Power Factor Close to 1 (Cos φ ≈ 1): Reduces energy losses and enhances energy efficiency.
- Advanced Protective Features:
- Motor Protection: The inverter monitors current and voltage levels, preventing overloads and failures.
- Reactive Power Compensation: Improves power quality and system stability.
- Motor-Side Benefits:
- High Starting Torque: Inverters enable full power from the start, which is crucial for applications with heavy loads.
- Variable Drive Characteristics: Allows adjustment of operating parameters to meet application requirements.
- Power Factor (Cos φ): Matches the motor’s nameplate specifications, enabling optimal control.

Voltage in Electric Motors: Proportionality of Voltage and Frequency
In electric motors, the supply voltage (V) and frequency (f) must be proportionally regulated to maintain a constant magnetizing current. This is crucial for ensuring proper motor operation and avoiding overload or performance loss.
Principle of V/f Proportionality
The constant ratio between voltage and frequency is the foundation of drive control. Here’s how it works:
- At Lower Frequencies: Voltage must be reduced to prevent motor overheating caused by excessive magnetizing current.
- At Higher Frequencies (up to 87 Hz): Voltage is increased to maintain torque and avoid magnetic saturation.
In practice, the voltage and frequency are proportionally regulated by the inverter (VFD frequency inverter), allowing precise adjustment of supply parameters to application needs.
Star (Y) and Delta (Δ) Connections
Different motor connection configurations require specific voltages and frequencies:
- Star Connection (Y): Requires lower voltage (e.g., 230 V at 50 Hz) and is used at lower frequencies.
- Delta Connection (Δ): Requires higher voltage (e.g., 400 V at 50 Hz) and supports operation at higher frequencies.
The switching point between Y and Δ occurs around a frequency of 50 Hz, consistent with power supply standards.
Practical Applications
Thanks to the V/f proportionality:
- Smooth speed regulation of the motor is achievable.
- The motor operates more energy-efficiently.
- Overload protection is ensured, enhancing the device’s lifespan.
Inverter technology enables real-time implementation of this proportionality, making it a cornerstone of modern motor control.

Motor Voltage in Inverter Operation: Ranges and V/f Proportions
Inverter operation is based on the proportionality between voltage (V) and frequency (f), ensuring optimal motor performance across the entire speed range. Additionally, the output voltage range (VMot) is limited by the inverter’s capabilities.
V/f Proportion Depending on Connection Type
According to the motor’s nameplate data, voltage and frequency values vary depending on the connection configuration:
- Star Connection (Y): Voltage range from 0 to 230 V, at frequencies up to 50 Hz.
- Delta Connection (Δ): Voltage range from 0 to 400 V, at frequencies up to 87 Hz.
Switching between configurations allows for better adjustment of supply parameters to the motor’s operating characteristics.
Voltage Adjustment Range by Inverter
The inverter’s capabilities define the maximum voltage that can be delivered to the motor:
- 230 V Output Inverters: Designed for applications with lower power demands.
- 400 V or Higher Output Inverters: Allow powering more demanding motors, providing higher power and rotational speed.
Importance of Nameplate Information
The V/f proportion and voltage range for the selected connection are specified on the motor’s nameplate. Proper matching of these parameters to the inverter settings is crucial for:
- Ensuring stable motor operation.
- Protecting against overload.
- Maximizing energy efficiency.
Practical Applications
Inverters enable dynamic regulation of voltage and frequency, making them an invaluable tool in applications requiring precise control of speed and torque. Examples of applications include industrial production lines, HVAC systems, and agricultural machinery.

V/f Characteristics: Basic Range and Field Weakening
The V/f characteristics in inverters allow for the adjustment of voltage and frequency to meet motor requirements under various operating conditions. Inverters operate in two main ranges: the basic range and the field weakening area.
Basic Setting Range
In this range, the motor voltage (VMot) changes proportionally to the rotational magnetic field frequency (frotation):
- Operating Range: From 0 Hz to the V/f reference point, typically 50 Hz (for standard power systems in Europe).
- Proportionality: Maintaining the ratio between V and f ensures a constant magnetizing current, which is critical for stable motor operation and optimal torque.
Field Weakening Range
Once the V/f reference point is exceeded, the motor voltage (VMot) remains constant while the frequency continues to increase:
- Effects: An increase in frequency at constant voltage reduces the magnetizing current, leading to a decrease in torque.
- Application: The field weakening range is used in applications requiring high speeds but lower loads.
Importance of V/f Characteristics
Managing the V/f characteristics allows the inverter to:
- Optimize motor performance across a wide range of loads and speeds.
- Ensure smooth transitions between different operating modes.
- Improve energy efficiency and reduce mechanical wear.
Practical Applications
V/f characteristics are utilized in drive systems such as conveyor belts, pumps, and fans, where speed and torque control are essential. With advanced features, inverters enable dynamic adjustment of operating parameters to meet application requirements.

Torque Characteristics of an Electric Drive: Asynchronous Motor Controlled by an Inverter
Inverter control in asynchronous motors enables precise torque control (T) across a wide range of speeds and loads. Key aspects of this characteristic include the division into the basic range and the field weakening range.
Basic Setting Range
In this range, the torque is maintained at a constant level up to the V/f reference point, which typically corresponds to the motor’s rated speed (nN):
Calculation of Output Torque:
Mout[Nm] = 9550 · Pout[kW]⁄nout[min-1]
- Mn – nominal torque,
- Pn – nominal power,
- nN – nominal speed in revolutions per minute.
Constant Torque: With a proportional increase in voltage and frequency (V/f), the motor generates maximum torque.
Field Setting Range
After exceeding the V/f reference point, the voltage remains constant while the frequency increases:
- Torque Reduction: In this range, the torque decreases proportionally to the inverse square of the frequency (1/f²).
- Purpose: This range is used to achieve high rotational speeds under low load conditions.
Key Points of the Characteristics
- Starting Torque (MStart): The torque generated at motor startup, sufficient to initiate the device’s operation.
- Critical Torque (Ms): The maximum torque that the motor can achieve.
- Nominal Point: The speed and torque at which the motor operates according to its nominal specifications.
Importance of Torque Characteristics in Inverter Control
Thanks to inverter control, it is possible to dynamically adjust motor operating parameters, ensuring:
- Optimal performance across a wide range of loads.
- Reduced energy losses during low-torque operation.
- Smooth motor start and stop.
Controlling torque characteristics is especially important in applications such as elevators, conveyor belts, and production machinery.

87 Hz Technology: Increased Power Through Connection Configuration Changes
The 87 Hz technology allows for increased power in standard asynchronous motors (230/400 V) by utilizing appropriate connection configurations and inverter control. Below are the key aspects of this technology.
Y and Δ Connections with V/f Reference Points
Standard motors can operate in two configurations with different V/f reference points:
- Star connection (Y): 400 V/50 Hz – typical for the standard operating range.
- Delta connection (Δ): 400 V/87 Hz – extends the basic operating range.
Effects of Δ Connection in 87 Hz Technology
Changing the connection to Δ at 87 Hz results in the following properties:
- Nominal Torque (MN):
Increases to the value:
MN = √3 · MN (for fN)
This means higher torque in the extended basic setting range.
- Nominal Power (PN):
Motor power increases:
PN,87Hz = √3 · PN,50Hz
This enables higher power output from the same motor.
- Motor Current (IM):
The inverter must provide a higher current, following the ratio:
IM,87Hz = √3 · IN,50Hz
Extended Basic Setting Range
Thanks to the 87 Hz technology, the Δ connection allows for:
- Maintaining high torque across a wide speed range.
- Better utilization of motor power without requiring larger units.
Applications of 87 Hz Technology
The 87 Hz technology is used in demanding applications such as:
- Transport and logistics: Conveyor belts requiring variable speeds and high torque.
- Production: Industrial machines with variable loads.
- HVAC: Fans and pumps operating under varying performance requirements.

4Q Drives: Energy Flow and Operating Modes
Four-quadrant (4Q) drives enable bidirectional energy flow in both motoring and generating modes. This advanced solution is used in systems where motion control is required in both directions.
Motoring Mode
In this mode, electrical energy is converted into mechanical energy, enabling the movement of an object (e.g., lifting a load). Depending on the direction of movement and the torque, the drive can operate in two quadrants:
- 1st Quadrant: Positive speed (n), positive torque (M) – upward movement when lifting a load.
- 3rd Quadrant: Negative speed (n), negative torque (M) – downward movement while controlling the descent.
Generating Mode
In this mode, mechanical energy is converted back into electrical energy and returned to the inverter or the grid. This approach is particularly advantageous in applications involving regenerative braking, such as cranes or elevators:
- 2nd Quadrant: Positive speed (n), negative torque (M) – controlled lowering of a load.
- 4th Quadrant: Negative speed (n), positive torque (M) – lifting a load in the opposite direction.
Energy Flow in a 4Q Drive
- Mechanical Energy → Electrical Energy (Generating Mode): The mechanical energy generated is fed back into the inverter, resulting in energy savings.
- Electrical Energy → Mechanical Energy (Motoring Mode): Energy from the power supply drives the motor, enabling the movement of the object.
Applications of 4Q Drives
Four-quadrant drives are used in systems that demand both precise motion control and efficient energy management, such as:
- Cranes and Elevators: Raising and controlled lowering of loads.
- Conveyor Belts: Bidirectional movement in logistics systems.
- Test Machines: Energy recovery in laboratory applications.

Energy Flow in a Frequency Inverter
Frequency inverters enable the control of energy flow in both directions—motoring (Motor Mode) and generating (Generator Mode). Understanding these mechanisms is crucial for efficient energy utilization.
Operation in Motor Mode
In this mode, electrical energy is converted into mechanical energy:
- Energy Flow: Three-phase mains power (L1, L2, L3) is fed into a rectifier, where it is converted into DC voltage on the DC bus (+Ug and -Ug). The inverter then converts this DC voltage into the appropriate AC voltage for a three-phase motor (M).
- Application: This mode is commonly used for driving loads such as conveyor belts, pumps, and fans.
Operation in Generator Mode
In this mode, mechanical energy is converted back into electrical energy:
- Energy Flow: Energy generated by the motor (e.g., during regenerative braking) is fed back into the inverter and then to the DC bus.
- Voltage Rise Phenomenon: Regenerative energy increases the DC bus voltage. If this voltage exceeds a certain permissible limit (e.g., 785 V for 400 V systems), the inverter will issue an overvoltage alert.
- No Return of Energy to the Grid: Due to the diode effect in the rectifier, energy cannot be returned to the supply network.
Limitations and Challenges
- DC Bus Overvoltage: Excess regenerative energy may require the use of braking resistors or other methods to safely dissipate surplus energy.
- Limited Regeneration: In standard inverters, the return of energy to the grid is blocked, limiting full energy recovery.
Practical Applications
- Regenerative Braking: Used in cranes, elevators, and transport systems to recover energy during descent or stopping.
- Energy Optimization: Helps reduce overall energy consumption in systems with frequent braking cycles.

Transferring Surplus Energy Between Drives
In multi-drive systems (with multiple inverters), the surplus energy generated by one drive can be transferred to another. This efficient solution enables the overall system’s energy optimization.
Energy Flow Mechanism
- Energy-Generating Drive (Drive 1):
- When a drive operates in generating mode (e.g., during braking), the mechanical energy is converted into electrical energy and fed into the DC bus.
- Surplus energy is not dissipated in braking resistors, but rather passed on further down the line.
- Energy-Receiving Drive (Drive 2):
- The energy accumulated on the DC bus can be used by another drive (e.g., operating in motoring mode).
- This energy supplies the motor, reducing the demand for energy from the grid.
Advantages of the Solution
- Ease of Implementation: The mechanism requires only a DC bus connection between inverters.
- Improved Energy Balance: Overall energy consumption is reduced, resulting in cost savings.
Limitations of the Solution
- Limited to Three-Phase Inverters: The mechanism only works in systems with three-phase inverters that share a common DC bus.
- Required Energy Balance: The surplus energy must be fully utilized by other drives in real-time, necessitating precise control.
Practical Applications
- Crane Systems: Energy generated while lowering a load by one motor can power another motor lifting a load elsewhere.
- Production Lines: Conveyor drives with regenerative braking transfer energy to drives operating in motoring mode.
- Industrial Automation: Enhances energy optimization in machines with multiple axes of motion.

Dissipating Surplus Energy Using a Braking Resistor
A braking resistor (RB) is employed in inverters as a solution to dissipate the excess energy generated during regenerative braking. While this method is effective, it comes with both advantages and limitations.
Operating Principle
- Generation of Surplus Energy:
- During regenerative braking, mechanical energy is converted into electrical energy.
- This energy increases the voltage on the DC bus (+Ug and -Ug).
- Energy Dissipation:
- If the DC bus voltage surpasses the permissible level, the surplus energy is diverted to the braking resistor.
- The resistor converts this electrical energy into heat, which is then dispersed into the surroundings.
Advantages of Using a Braking Resistor
- High Overload Capacity: The braking resistor can handle large amounts of energy in a short time, making it ideal for dynamic applications.
- Independence from the Grid: Dissipating energy as heat does not require a connection to the power grid.
Limitations
- Energy Loss: Converting energy into heat is energetically inefficient and runs counter to energy efficiency goals.
- Heat Generation: Excessive heat may necessitate additional cooling systems, increasing costs and system complexity.
Practical Applications
- Dynamic Applications: Braking resistors are used in systems where rapid and frequent braking occurs, such as cranes, hoists, and CNC machines.
- Safety: In systems where DC bus overvoltage could damage components, a braking resistor is a key protective element.
Alternatives
In more advanced systems, instead of dissipating energy as heat, other methods can be employed
- Energy Recuperation: Feeding energy back into the grid or supplying it to other drives in the system.
- Energy Storage: Utilizing batteries or supercapacitors to store the surplus energy for later use.

Transferring Energy in Multi-Drive Systems
The diagram (illustration) depicts the mechanism of sharing regenerative energy among drives in a multi-drive setup. This practical solution improves energy efficiency and reduces energy losses.
Operating Principle
- Energy Generation: When a drive operates in generating mode (e.g., during regenerative braking), mechanical energy is converted into electrical energy. This energy is then directed to the common DC bus (+Ug and -Ug).
- Energy Utilization: Another drive, operating in motoring mode, uses the energy stored on the DC bus to power its three-phase motor (M3). As a result, the reliance on energy drawn from the grid is reduced.
Advantages of this Approach
- Improved Efficiency: It reduces the consumption of energy from the electrical grid, translating into lower operating costs.
- Elimination of Braking Resistor Losses: Instead of being wasted as heat, the excess energy is transferred to other drives.
- Balanced System: A common DC bus enables dynamic energy balancing among the drives.
Limitations and Requirements
- Energy Balance: For the system to operate efficiently, one drive’s energy surplus must align with the other drive’s energy demand.
- Compatibility: This mechanism works only in systems with three-phase inverters capable of sharing a DC bus.
Practical Applications
Such solutions are utilized in industrial production lines, cranes, and conveyor systems, where multiple drives operate under dynamic load cycles.

Summary
Servo drives and Variable Frequency Drives (VFDs) play a key role in modern automation systems. They provide precise speed and torque control while optimizing energy consumption. The 87 Hz technology extends the operating range of motors, and 4Q drives enable efficient energy management. Transferring surplus energy between drives improves the overall energy balance of the system, while energy dissipation through braking resistors is utilized in dynamic applications. Implementing these technologies enhances the efficiency, reliability, and flexibility of industrial solutions, making it a forward-looking investment in the future of automation.
If you found this post interesting, we encourage you to explore our range of online courses: https://www.controlbyte.tech/